自动驾驶控制:入门篇
纵向控制:P 控制器
用速度误差计算加速度。
这篇文章讲什么
前面已经讲了:
- 控制器需要参考轨迹和车辆状态
- 车辆模型描述车辆怎么动
这一篇开始真正写控制器。
先从最简单的纵向控制开始。
纵向控制要解决的问题是:
车速应该怎么控制?
在自动驾驶控制里,纵向控制通常负责输出:
加速度 a
也就是让车:
- 该快的时候快一点
- 该慢的时候慢一点
- 该保持速度的时候尽量稳定
这一篇只讲最简单的 P 控制器。
纵向控制控制什么
车辆运动可以简单拆成两个方向:
纵向:车沿着前进方向快慢变化
横向:车往左还是往右转
纵向控制管的是速度。
它不关心车现在应该往左还是往右,它只关心:
目标速度是多少?
当前速度是多少?
我应该加速还是减速?
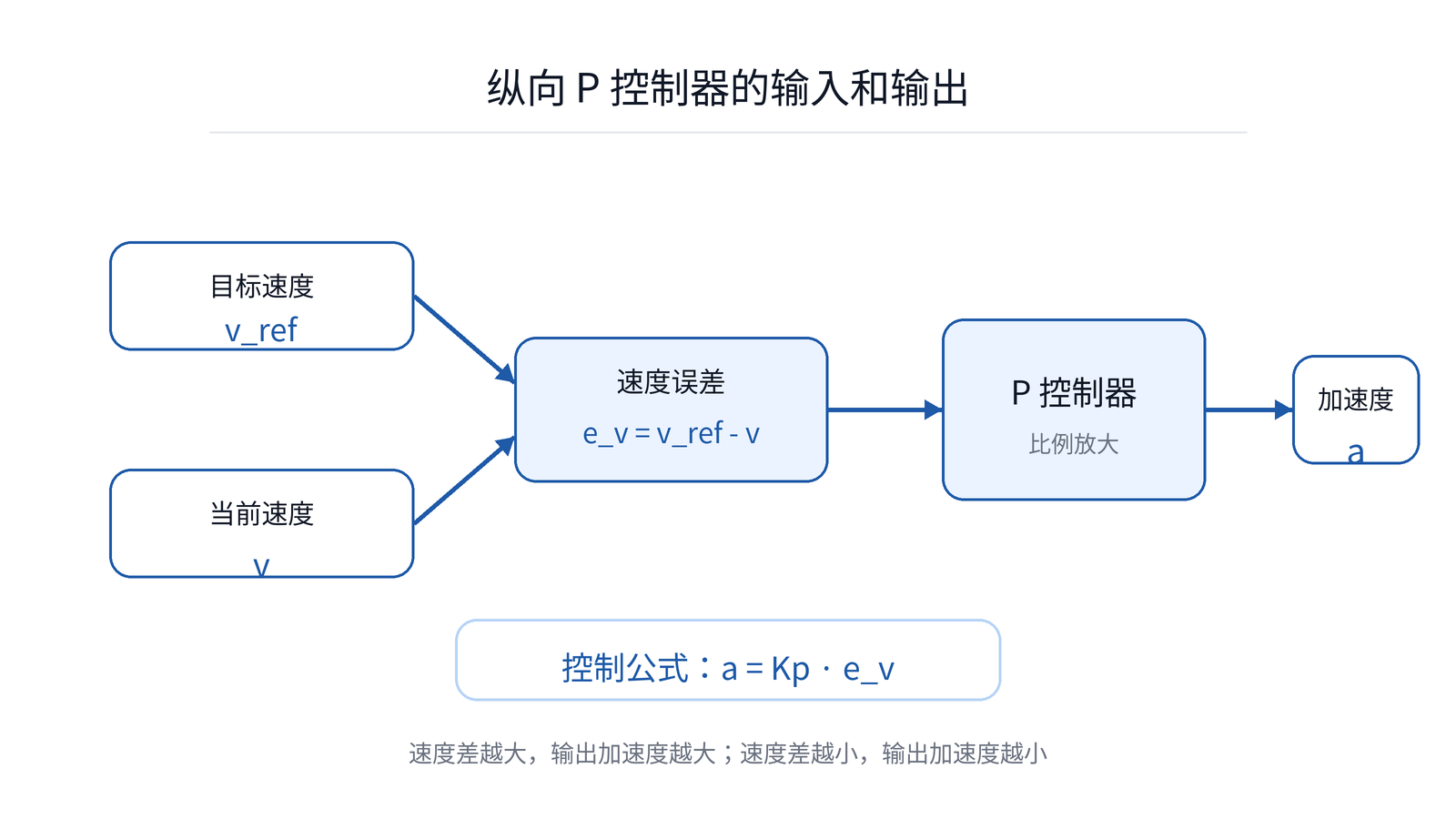
所以纵向控制器的输入可以先理解成:
目标速度 v_ref
当前速度 v
输出是:
加速度 a
目标速度和当前速度
目标速度来自参考轨迹。
比如某个参考点上写着:
v_ref = 10 m/s
意思是车辆经过这个点附近时,最好以 10 m/s 左右的速度行驶。
当前速度来自车辆状态。
比如当前车辆状态里写着:
v = 8 m/s
说明现在车速只有 8 m/s。
这时候控制器看到:
目标速度 10 m/s
当前速度 8 m/s
就知道车慢了,应该加速。
如果当前速度是 12 m/s,那就说明车快了,应该减速。
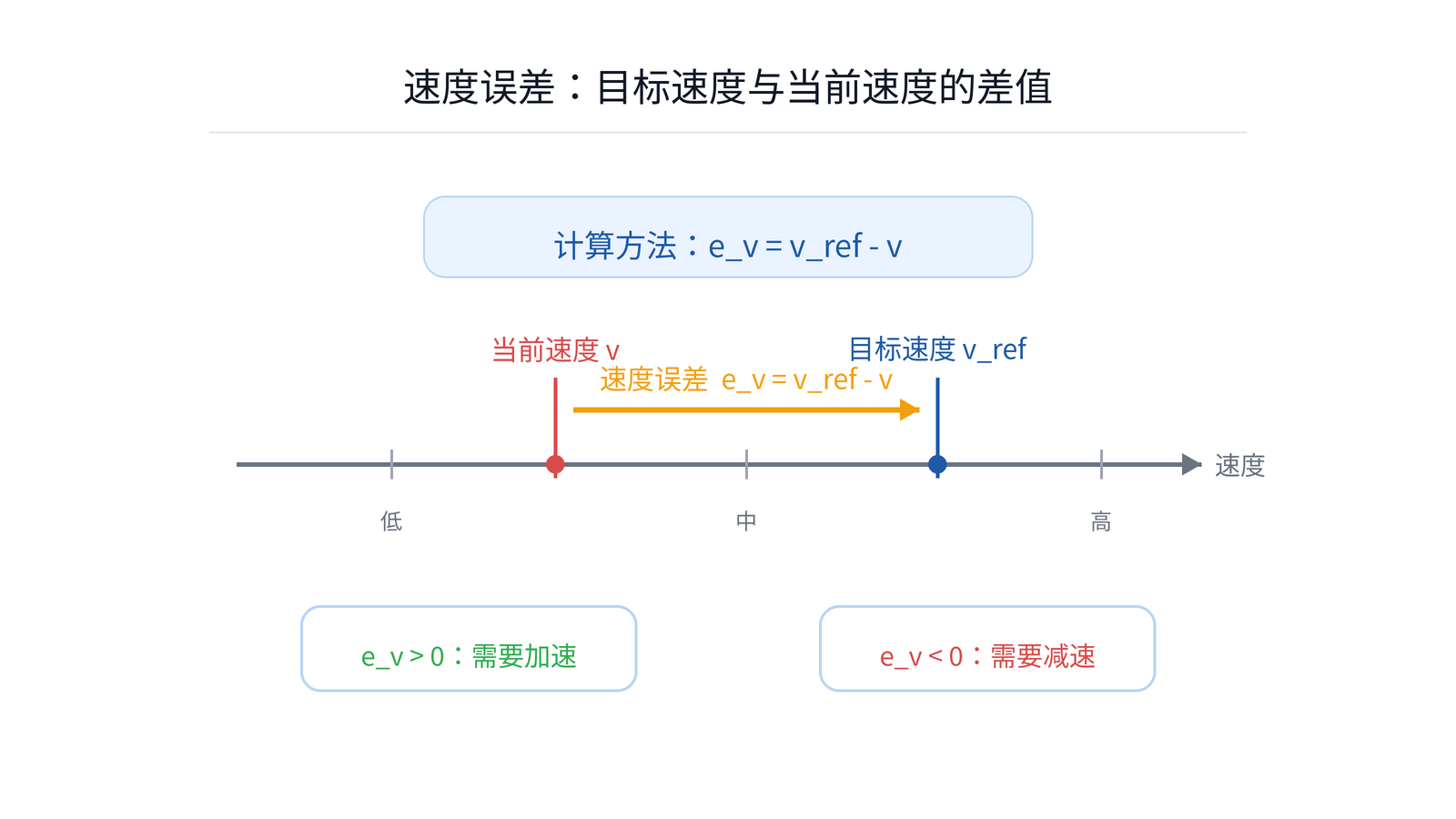
速度误差
P 控制器的核心是误差。
纵向速度误差定义为:
$$ e_v = v_{ref} - v $$
其中:
| 符号 | 含义 |
|---|---|
e_v |
速度误差 |
v_ref |
目标速度 |
v |
当前速度 |
这个公式很直观:
e_v > 0:当前速度比目标速度低,需要加速e_v < 0:当前速度比目标速度高,需要减速e_v = 0:当前速度接近目标速度,不需要明显调整
P 控制器公式
P 控制器就是把误差乘上一个系数。
公式是:
$$ a = K_p e_v $$
也就是:
$$ a = K_p (v_{ref} - v) $$
其中:
| 符号 | 含义 |
|---|---|
a |
输出加速度 |
K_p |
比例系数 |
e_v |
速度误差 |
它的直觉很简单:
速度差得越多,加速度越大
速度差得越少,加速度越小
比如:
| 目标速度 | 当前速度 | 速度误差 | 控制结果 |
|---|---|---|---|
| 10 | 8 | 2 | 加速 |
| 10 | 10 | 0 | 基本不变 |
| 10 | 12 | -2 | 减速 |
这就是 P 控制器最核心的思想。
Kp 怎么理解
K_p 决定控制器有多“激进”。
如果 K_p 太小:
- 加速很慢
- 速度追踪反应迟钝
- 目标速度变了以后,车辆很久才跟上
如果 K_p 太大:
- 加速度变化太猛
- 速度可能来回波动
- 乘坐体验会变差
所以 K_p 不是越大越好。
入门阶段可以先这样理解:
Kp 小:稳,但慢
Kp 大:快,但容易抖
实际调参时,通常先给一个小值,让车能稳定追速度,再慢慢加大。
![]()
从加速度到油门刹车
控制算法里算出来的是加速度 a。
但真实车辆或者仿真器通常接收的是:
- 油门
- 刹车
- 方向盘
所以还需要一步转换。
最简单的处理方式是:
如果 a > 0:给油门
如果 a < 0:给刹车
比如可以先写成:
if a > 0:
throttle = map_acc_to_throttle(a)
brake = 0
else:
throttle = 0
brake = map_acc_to_brake(-a)
在入门系统里,不需要一开始就把油门刹车映射做得特别精细。
先把“速度误差 → 加速度 → 油门/刹车”这条链路跑通最重要。
工程实现思路
一个最小 P 速度控制器可以这样写:
def p_speed_controller(target_speed, current_speed, kp):
error = target_speed - current_speed
acceleration = kp * error
return acceleration
真实使用时,一般还要给加速度加限制。
比如:
acceleration = clamp(acceleration, min_acc, max_acc)
原因很简单:
如果速度误差很大,P 控制器可能算出一个很大的加速度。
但车辆不可能无限加速,也不应该猛加速。
所以通常会限制输出范围:
最大加速度
最大减速度
一个更完整一点的版本可以写成:
def p_speed_controller(target_speed, current_speed, kp):
error = target_speed - current_speed
acceleration = kp * error
acceleration = clamp(acceleration, -max_brake_acc, max_acc)
return acceleration
放到控制循环里
纵向控制器不是单独运行的。
它会放在整个自动驾驶控制循环里:
while running:
state = get_vehicle_state()
target_point = find_target_point(reference_path, state)
target_speed = target_point.v
current_speed = state.v
a = p_speed_controller(target_speed, current_speed, kp)
这一步算出来的 a,后面会和横向控制器算出来的转向角 δ 一起发送给车辆。
也就是:
纵向控制器 → 加速度 a
横向控制器 → 转向角 δ
这一篇只解决前半部分。
小结
这一篇只需要记住一句话:
P 控制器用速度误差来计算加速度。
公式就是:
$$ e_v = v_{ref} - v $$
$$ a = K_p e_v $$
它简单,但足够帮我们搭起最小自动驾驶控制系统里的纵向控制部分。